
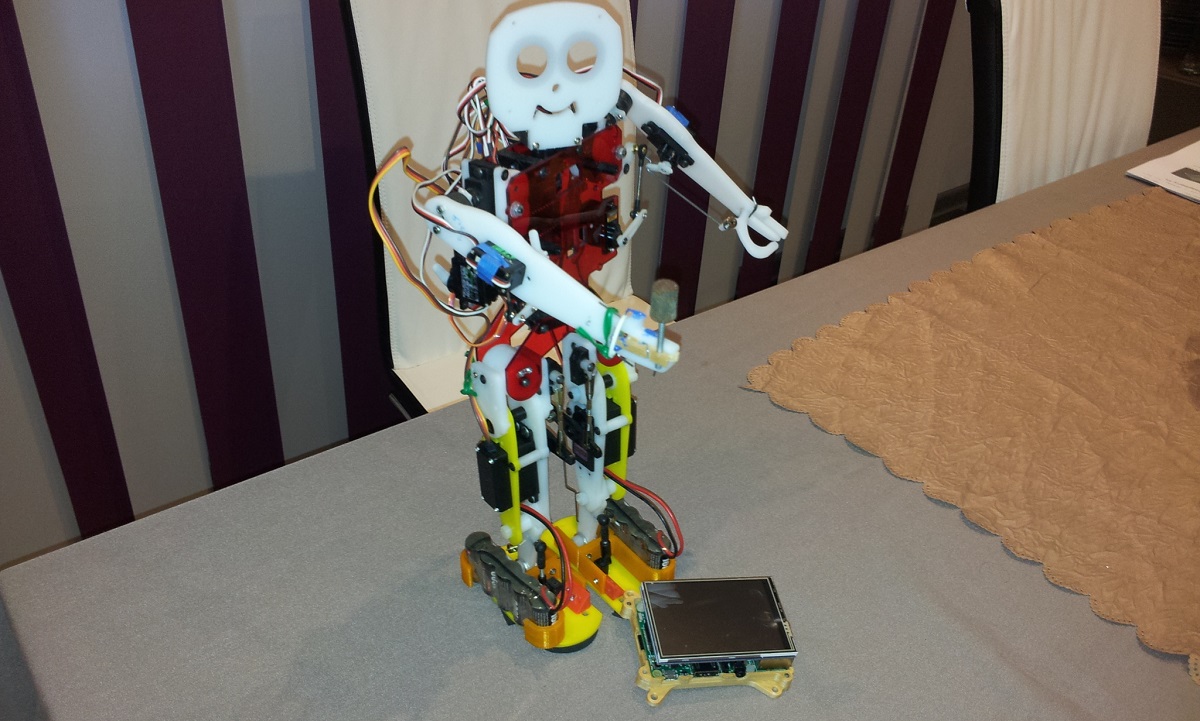
coucou me voici me voila avec encore mes anciennes jambes…..bien plus longues mais je tombais toujours…alors à présent je suis un peu raccourci…hi hi,vous pouvez me visualiser tout en bas de cette page il y a deux petits films…à bientôt
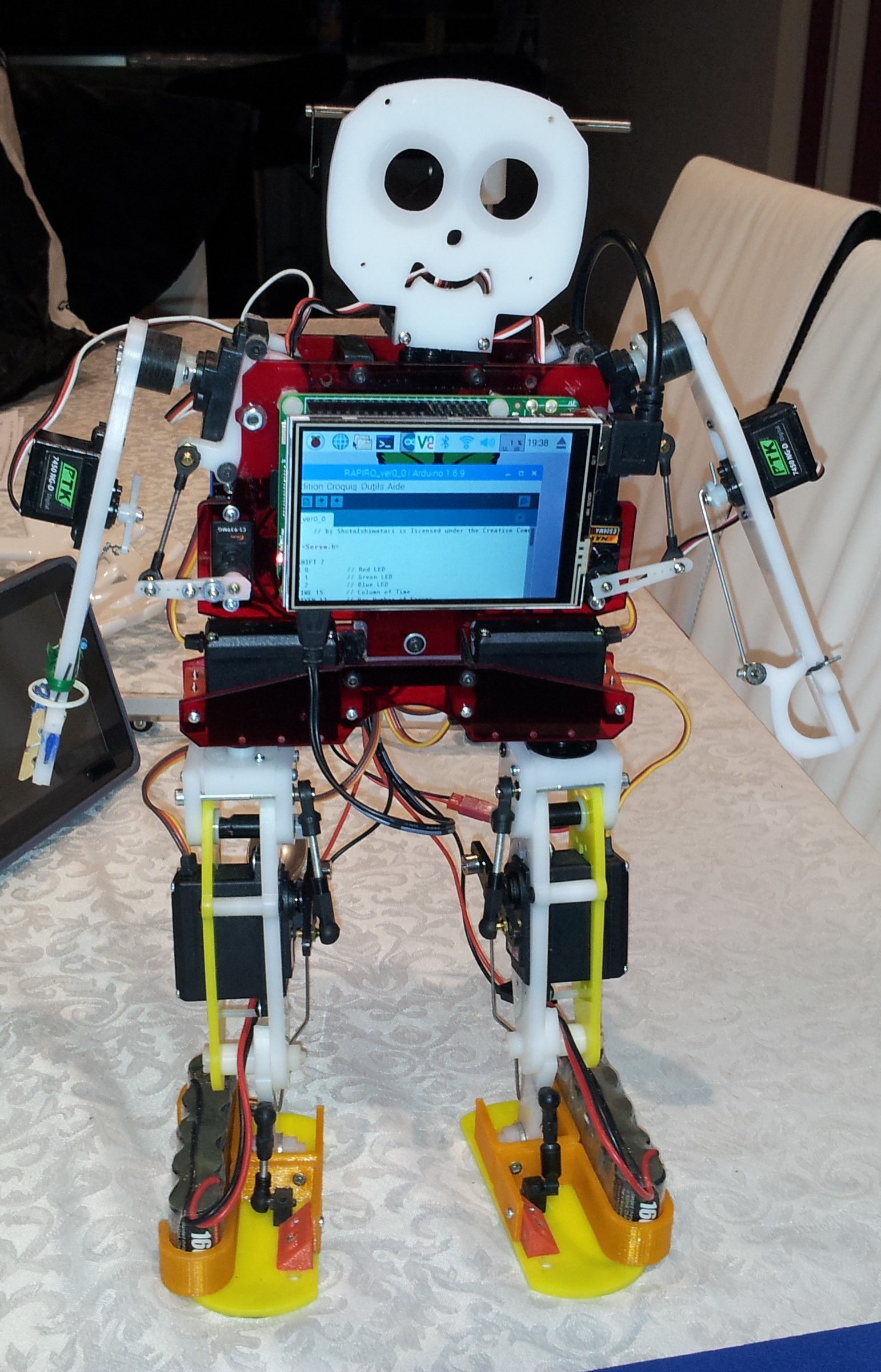
La version finale et conforme à celle sur la vidéo en mouvement de cro-mignon en fin d’article lien youtube et conforme aux plans pdf joints.Actuellement des nouvelles mains articulées sont à l’essai…
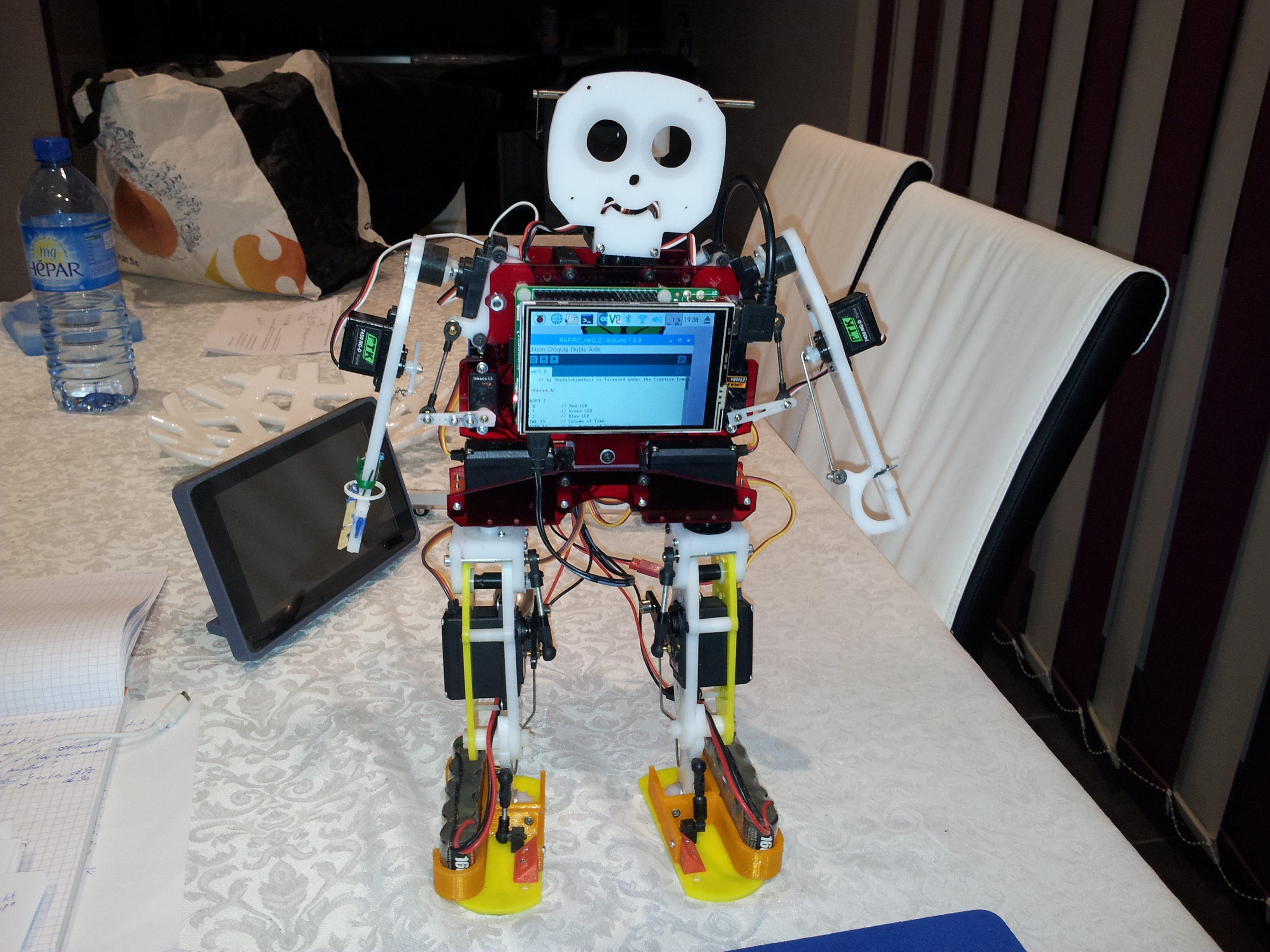
ET voila je suis bientôt autonome , encore un peu de boulot de découpe plastique et de fixation et de paramètrage d’ecran, de branchement électriques pour le reste …se sera la programmation plus fine pour la marche,car les fonctions, tête, bras, mains sont toutes OK..

Voici l’ecran 3.5i nch que j’ai préparé sur un raspberry pi 3 pour communication bluethooth avec cro… il remplacera il pi2
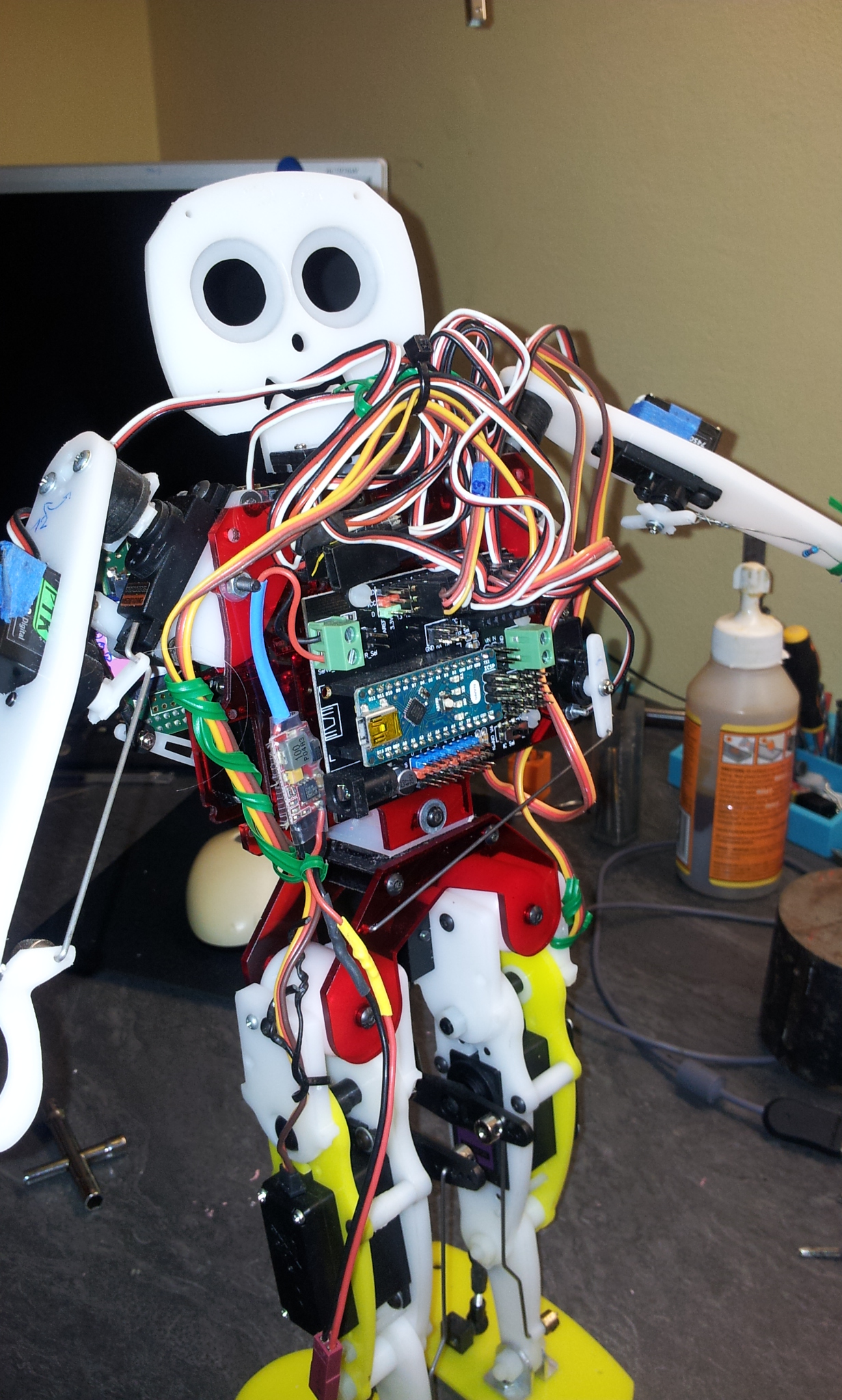
et cette vue de dos…mon shield avec mon arduino nano…bientôt je serai libre plus de connectique par fil…j’aurai même la parole vouaaaa!!!
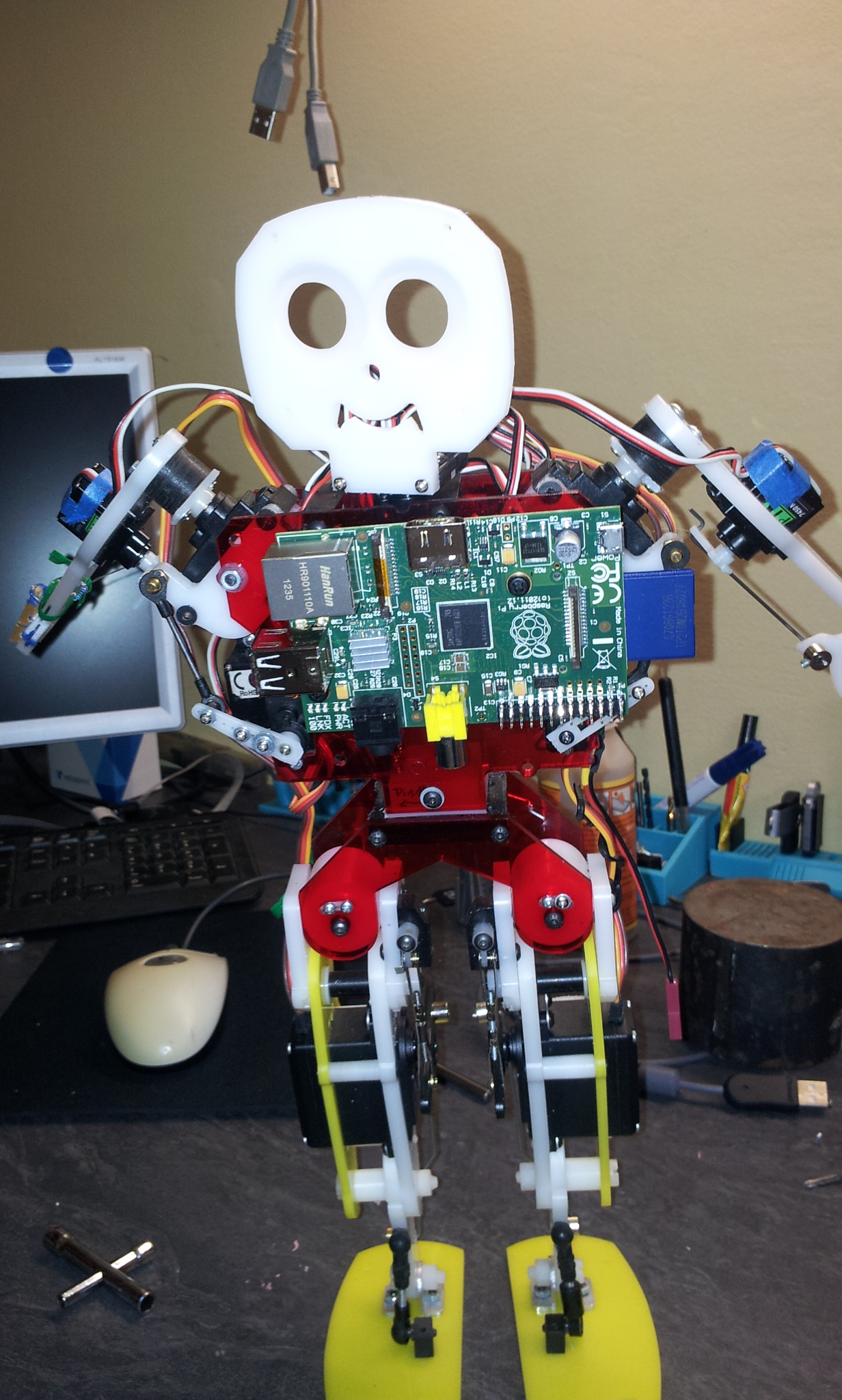
voici mon ventre avec mon raspberry il me manque encore l’ecran:LCD-PI43
 Obligé de faire des servos double fixation moi même car introuvable à un prix résonable pour mini-servos de 22x11x20mm, un jeu d’enfant avec ma step, puis abandon de ce projet utilisation de servos standard cause open source…les programmes dxf des pièces du robot étant disponible sur demande…bien sûr.
Obligé de faire des servos double fixation moi même car introuvable à un prix résonable pour mini-servos de 22x11x20mm, un jeu d’enfant avec ma step, puis abandon de ce projet utilisation de servos standard cause open source…les programmes dxf des pièces du robot étant disponible sur demande…bien sûr.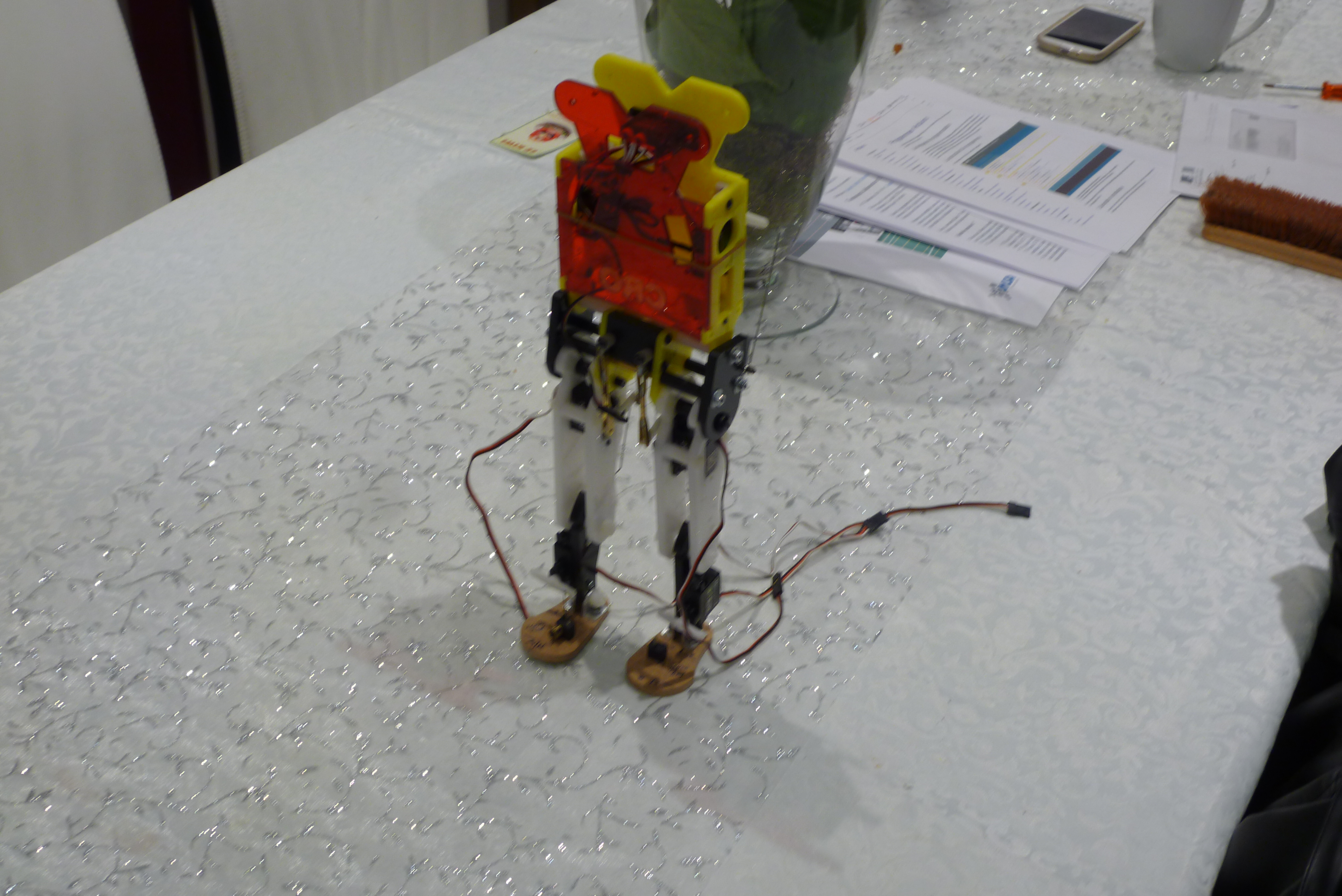 Quelques photos pour vous montrer l’évolution des travaux concernant mon robot cro – mignon…
Quelques photos pour vous montrer l’évolution des travaux concernant mon robot cro – mignon…
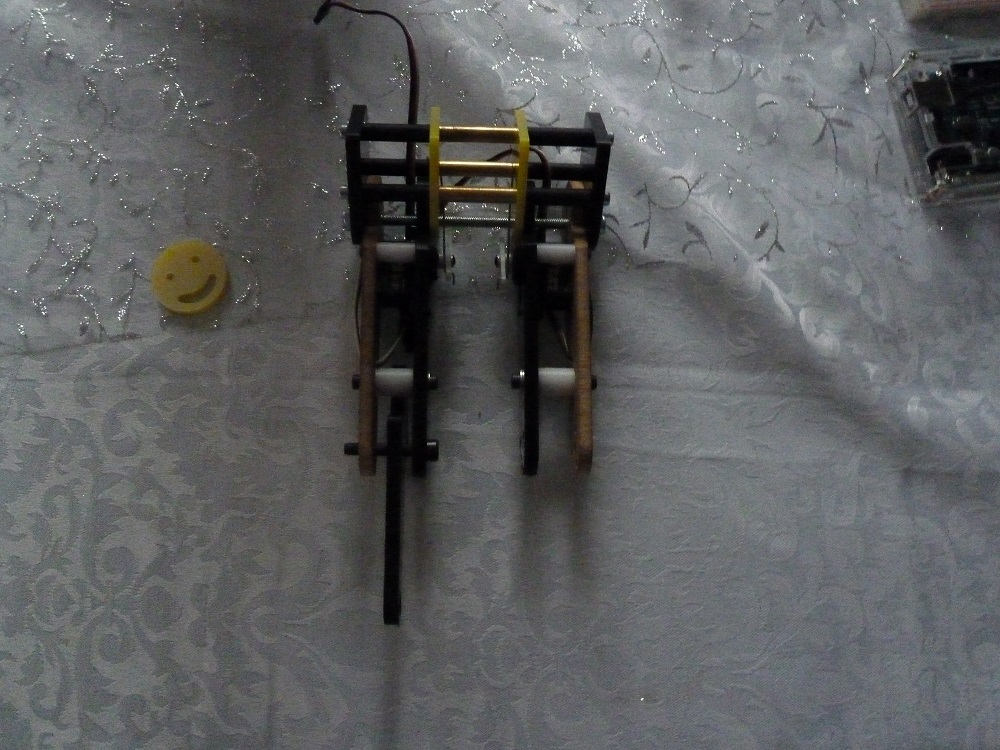
le début du début
Voici donc ce projet de robot humanoide pour permettre aux jeunes de développer les fonctions et mouvements de cro-mignon. les pièces sont en plexi et les mouvements générés par des simples servos. Destiné dans un premier temps à étre utilisé avec une carte arduino j’ai rajouté un raspi pour faire un peu comme Rapiro, c’est d’ailleurs le même programme que Rapiro avec des différences du à une autre architecture. Et c’est à partir du raspi qu’on peut programmer le robot avec un clavier bluethooth.

2 réflexions sur “CRO-MIGNON le Robot Humanoide Français”